Donnerstag 2. Oktober 2025
Baro 1023, sonnig, Wind 12 – 7 – 10 Knoten aus nördlichen Richtungen, Etmal 134
Seit Mitternacht zieht uns die Genua und das Großsegel übers Wasser, total ruhig, das ist sehr entspannt für Skipper und Navigatorin. Nach dem Frühstück wird wieder der Gennaker ausgerollt, bei einem Windwinkel von 135º zieht der am besten trotz eher leichten Windes zwischen sieben und zehn Knoten. Wir haben Glück, tatsächlich gibt es mehr Wind, zumindest da, wo wir gerade sind, als in allen Voraussagen, PredictWind, ECMWF, GFS, Spire und UKMO angekündigt war. Wir wollen mal nicht meckern und freuen uns über einen Tag mit Gennaker.



Es ist wunderschön warm, wir genießen die Sonne auf dem Vordeck, leider ohne den Besuch von putzigen Delfinen, und glücklicherweise ohne den Besuch von spielenden Walen, die unsere Ruder anknabbern würden. An der portugiesischen Küste haben gestern und heute wieder drei Angriffe in der Nähe von Viano do Castelo stattgefunden, und das sind nur die drei, die registriert wurden. Deshalb versuchen wir auf jeden Fall, einen Abstand von mindestens 70 Meilen von der Küste zu halten, in dieser Entfernung gab es bisher noch keine Angriffe und auch keine Sichtungen.


Die Freude über das angenehme Segeln bei schönem Wind hat leider am frühen Abend ein Ende, denn der Wind geht komplett schlafen, nachdem er sich nicht mehr sicher war, woher er wehen soll. Um 21 Uhr holen wir den neuen Wetterbericht von PredictWind, und der macht aber gar nicht viel Hoffnung. Bis mindestens morgen Abend werden wir unter Motor fahren müssen, und auch danach ist der Wind eher mittelmäßig aus Nord. Das ist für uns aus falscher Richtung, weil er direkt von hinten kommt, und das Segeln dann allerhöchstens mit Spinnaker funktioniert, aber sicher auch nicht schnell ist, und sehr anstrengend, denn man muss auf die kleinste Winddrehung reagieren.


Die Front, die am Abend rings um uns herum aufzieht, macht Volker Hoffnung auf eine windige Nacht, sie zieht aber an uns vorbei.
Es hilft ja nix, auch wenn Volker über den nicht vorhandenen Wind meckert und natürlich ich daran Schuld bin, der Motor muss an, wenn wir weiter kommen wollen. Auf jeden Fall wird die Nacht entspannt werden, keiner muss nach der korrekten Segelstellung schauen, oder reffen oder ausreffen. Falls uns irgendwelche Schiffe zu nahe kommen, warnen AIS- und Radaralarme so laut, dass man es selbst im Tiefschlaf hören würde.
Volker schreibt:
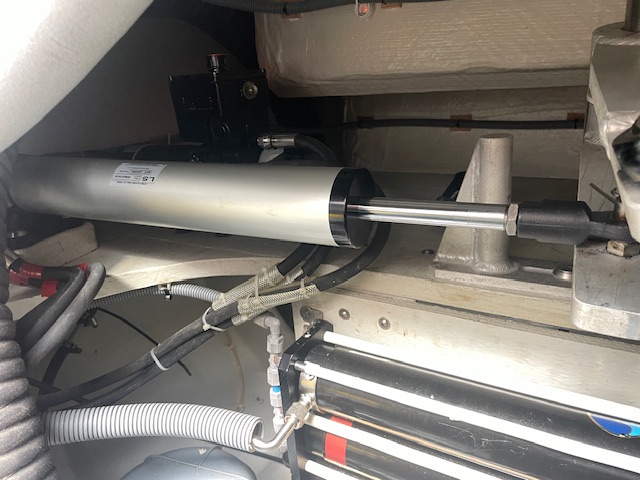
Aufs Grad genau steuert der Autopilot, virtuelles Segeln nenne ich das, man sitzt vorm Plotterbildschirm und stellt den Kurs zum Wind so ein, dass der Gennaker genügend Druck entwickelt, damit die Hexe gut läuft. Ein Grad nach Backbord, drei Grad nach Steuerbord, fünf Grad nach Backbord, permanent wird der Kurs optimiert. Das Steuersignal für den Autopiloten geht dabei folgenden Weg, über die Eingabetasten am Plotterbildschirm oder über die Fernbedienung des Autopiloten geht die Kurseingabe zum Kurscomputer, der mit seinem Kreiselkompass unter dem hinteren Bett installiert ist. Der Kurscomputer sendet per Kabel ein Signal an den Ruderlagensensor, der achtern im Motorraum direkt mit dem der hydraulischen Schubstange verbunden ist. Der Kolben in der hydraulischen Schubstange bewegt sich und überträgt diese Bewegung auf den Ruderquadranten und damit direkt auf das Ruder. Der gewünschte neue Kurs liegt an.


Beide Autopiloten, egal ob der im Badkbordrumpf oder der im Steuerbordrumpf, arbeiten zuverlässig wie ein ein Uhrwerk und halten unser Schiff sicher und zuverlässig bei allen Wetterbedingungen auf Kurs. Damit das so ist, tauschen wir schon bei kleinsten Undichtigkeiten die Hydraulikzylinder aus, ersetzen Dichtungen, erneuern den Ruderlagensensor und kontrollieren vor längeren Reisen die zahlreichen Halteschrauben der Ruderquadranten. Nur eins tun wir nicht, wie viele andere Segler es machen, wir haben unseren Autopiloten bis jetzt noch keinen Namen gegeben. Auch namenlos erhalten sie viel Andacht und Zuwendung, sie sind der 3. Steuermann an Bord.